Despite the fact that the motors are physically TINY, they seem to have enough power to carry Bernie around fairly comfortably. Better yet, I have got the program to work so that the analog joystick on the Playstation controller operates the two motors and lets me steer! I expect he will get slowed down once he is dragging the full load of skin and wings and his tail is reattached, but for now he is pretty zippy.
 In a very exciting moment I connected a Lynxmotion PS2 wireless controller via a Lynxmotion PS2 receiver to to the arduino, installed Bill Porter's wonderful PS2X library, supplied power to the arduino and the outputs and downloaded the example program and - TA DA - I have remote control of my arduino, which means very very soon Bernie will be operated remotely. Many many thanks go to Bill for this lovely little library which makes this all so easy to do. On a side note, having looked at the price of battery chargers and batteries it might be a while before he is moving around completely remotely...
I've had a few questions about how 'wired' this dragon is. 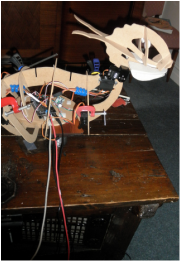 This is what he looks like at the moment. As you can see, he is tethered to power by two power cables (the black and red you can see in the photo), and has a usb cable (the grey one) which can connect to my laptop to reprogram the arduino.
The usb cable is completely removable, which leaves the two power supplies. These can both be replaced by rechargeable li-po batteries when the dragon moves beyond the current testing phase. That's the easy bit though. I want a control panel which will allow me to interact with the dragon and control him to move around, which means I will eventually need to work out some remote wireless i/o. I'm not going to be up to that for a while though, so I can do a lot more research first. |
AuthorTess is an Engineer who sometimes gets a bit carried away with her hobbies, which include animatronics, uavs and millinery. Archives
March 2015
Categories
All
|
 RSS Feed
RSS Feed
