
It's been quite a long time since I've updated here, which sadly reflects just how long it has been since I've had some spare time to work on Bernie: between organizing the Melbourne Mini and studying for exams it's been a very busy couple of months! I finally have some holidays so I can get going on Bernie and flesh out some of the designs I've been working on.
Poor Bernie has been sitting there on the coffee table unable to move for a while now. He has developed a bit of a lean because his poor tummy is carrying all of his weight, He can't even wave when people come to visit him. Clearly this must be fixed, and as many a quadruped knows, limbs are handy things to have around.
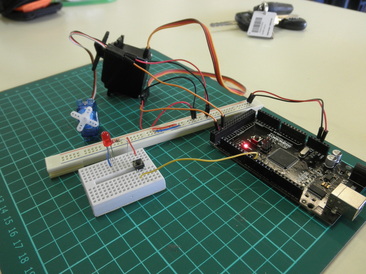
I've been thinking about how to do this for a while now, because I want to use just one servo motor to control the whole limb. This will reduce the load on the arduino, simplify the programming and make the leg lighter, but makes the mechanism more complicated to design. I started by playing with some cardboard, and then went back to the drawing board to see how I could make this idea work. Like all of this project, there is a lot of documentation which will probably never see the light of day, but it sure does help fill a boring lecture and makes construction much easier and quicker.
Poor Bernie has been sitting there on the coffee table unable to move for a while now. He has developed a bit of a lean because his poor tummy is carrying all of his weight, He can't even wave when people come to visit him. Clearly this must be fixed, and as many a quadruped knows, limbs are handy things to have around.
I've been thinking about how to do this for a while now, because I want to use just one servo motor to control the whole limb. This will reduce the load on the arduino, simplify the programming and make the leg lighter, but makes the mechanism more complicated to design. I started by playing with some cardboard, and then went back to the drawing board to see how I could make this idea work. Like all of this project, there is a lot of documentation which will probably never see the light of day, but it sure does help fill a boring lecture and makes construction much easier and quicker.

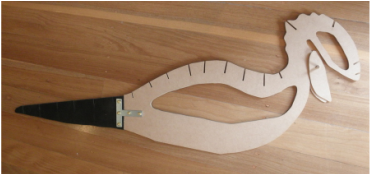
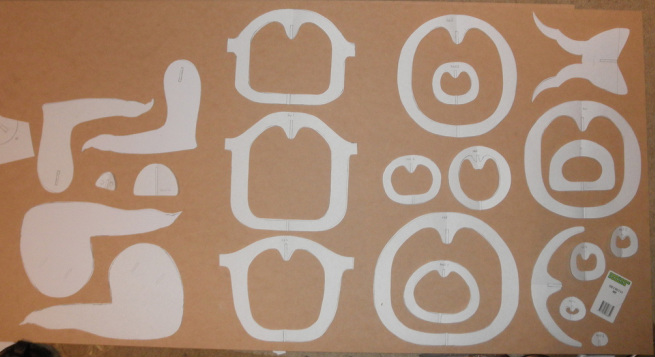
Just like my very first bit of body construction I decided to make a cardboard prototype to see if my idea really worked. Initially I had different designs for the arms and legs because they are such different shapes, but I didn't like the extra complexity in the legs so I have decided to modify the design to work on a single concept. The joints work because the string does not change length - both ends are fixed to the leg, but there is a pulley point on the body so that the relative motion of the leg to the body makes the elbow/knee extend.
Before anyone asks, these legs are not in any way load rated! They will not be carrying the weight of the dragon, just providing some balance and making him look less like a glorified snake.
Before anyone asks, these legs are not in any way load rated! They will not be carrying the weight of the dragon, just providing some balance and making him look less like a glorified snake.




 RSS Feed
RSS Feed
