
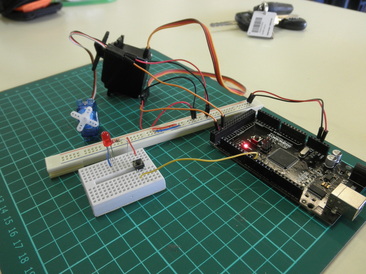
In a very exciting moment I connected a Lynxmotion PS2 wireless controller via a Lynxmotion PS2 receiver to to the arduino, installed Bill Porter's wonderful PS2X library, supplied power to the arduino and the outputs and downloaded the example program and - TA DA - I have remote control of my arduino, which means very very soon Bernie will be operated remotely. Many many thanks go to Bill for this lovely little library which makes this all so easy to do.
On a side note, having looked at the price of battery chargers and batteries it might be a while before he is moving around completely remotely...



 RSS Feed
RSS Feed
